Original Paper: Sparse Identification of Nonlinear Dynamical systems (SINDy)
This notebook uses PySINDy to reproduce the example systems from the paper “Discovering governing equations from data: Sparse identification of nonlinear dynamical systems”. We provide some mathematical background regarding each example in this notebook and suggest looking to the original paper for further details.
![]()
[1]:
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib.cm import rainbow
import numpy as np
from scipy.integrate import solve_ivp
from scipy.io import loadmat
from pysindy.utils import linear_damped_SHO
from pysindy.utils import cubic_damped_SHO
from pysindy.utils import linear_3D
from pysindy.utils import hopf
from pysindy.utils import lorenz
import pysindy as ps
# ignore user warnings
import warnings
warnings.filterwarnings("ignore", category=UserWarning)
np.random.seed(1000) # Seed for reproducibility
# Integrator keywords for solve_ivp
integrator_keywords = {}
integrator_keywords['rtol'] = 1e-12
integrator_keywords['method'] = 'LSODA'
integrator_keywords['atol'] = 1e-12
Simple illustrative systems
Here we give examples of SINDy applied to simple linear and nonlinear dynamical systems. In each instance the SINDy object is given measurements of state variables, but not their derivatives, and is tasked with identifying the equations to describe their dynamics.
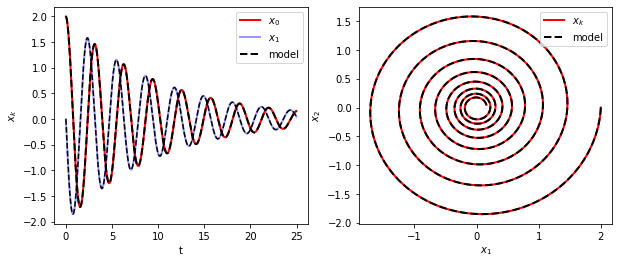
Linear 2D ODE
The first example shows a demonstration of SINDy on a linear two-dimensional damped harmonic oscillator.
We generate training data by integrating the following linear system of differential equations with initial condtion \((2,0)\).
[2]:
# Generate training data
dt = 0.01
t_train = np.arange(0, 25, dt)
t_train_span = (t_train[0], t_train[-1])
x0_train = [2, 0]
x_train = solve_ivp(linear_damped_SHO, t_train_span,
x0_train, t_eval=t_train, **integrator_keywords).y.T
Next we fit a SINDy model to the training data, finding that it recovers the correct governing equations.
[3]:
# Fit the model
poly_order = 5
threshold = 0.05
model = ps.SINDy(
optimizer=ps.STLSQ(threshold=threshold),
feature_library=ps.PolynomialLibrary(degree=poly_order),
)
model.fit(x_train, t=dt)
model.print()
(x0)' = -0.100 x0 + 2.000 x1
(x1)' = -2.000 x0 + -0.100 x1
The learned model can be used to evolve initial conditions forward in time. Here we plot the trajectories predicted by the SINDy model against those of the true governing equations.
[4]:
# Simulate and plot the results
x_sim = model.simulate(x0_train, t_train)
plot_kws = dict(linewidth=2)
fig, axs = plt.subplots(1, 2, figsize=(10, 4))
axs[0].plot(t_train, x_train[:, 0], "r", label="$x_0$", **plot_kws)
axs[0].plot(t_train, x_train[:, 1], "b", label="$x_1$", alpha=0.4, **plot_kws)
axs[0].plot(t_train, x_sim[:, 0], "k--", label="model", **plot_kws)
axs[0].plot(t_train, x_sim[:, 1], "k--")
axs[0].legend()
axs[0].set(xlabel="t", ylabel="$x_k$")
axs[1].plot(x_train[:, 0], x_train[:, 1], "r", label="$x_k$", **plot_kws)
axs[1].plot(x_sim[:, 0], x_sim[:, 1], "k--", label="model", **plot_kws)
axs[1].legend()
axs[1].set(xlabel="$x_1$", ylabel="$x_2$")
fig.show()
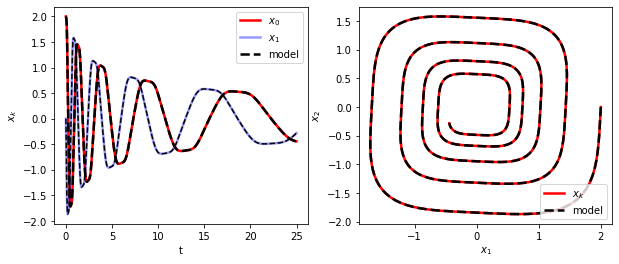
Cubic 2D ODE
SINDy can also identify a nonlinear two-dimensional damped harmonic oscillator. This example involves cubic dynamics. The governing system used to generate training data is as follows. It is identical to the previous example except the linear terms in the right-hand side have been replaced with cubic ones.
[5]:
# Generate training data
dt = 0.01
t_train = np.arange(0, 25, dt)
t_train_span = (t_train[0], t_train[-1])
x0_train = [2, 0]
x_train = solve_ivp(cubic_damped_SHO, t_train_span,
x0_train, t_eval=t_train, **integrator_keywords).y.T
[6]:
# Fit the model
poly_order = 5
threshold = 0.05
model = ps.SINDy(
optimizer=ps.STLSQ(threshold=threshold),
feature_library=ps.PolynomialLibrary(degree=poly_order),
)
model.fit(x_train, t=dt)
model.print()
(x0)' = -0.100 x0^3 + 1.999 x1^3
(x1)' = -1.999 x0^3 + -0.100 x1^3
[7]:
# Simulate and plot the results
x_sim = model.simulate(x0_train, t_train)
plot_kws = dict(linewidth=2.5)
fig, axs = plt.subplots(1, 2, figsize=(10, 4))
axs[0].plot(t_train, x_train[:, 0], "r", label="$x_0$", **plot_kws)
axs[0].plot(t_train, x_train[:, 1], "b", label="$x_1$", alpha=0.4, **plot_kws)
axs[0].plot(t_train, x_sim[:, 0], "k--", label="model", **plot_kws)
axs[0].plot(t_train, x_sim[:, 1], "k--")
axs[0].legend()
axs[0].set(xlabel="t", ylabel="$x_k$")
axs[1].plot(x_train[:, 0], x_train[:, 1], "r", label="$x_k$", **plot_kws)
axs[1].plot(x_sim[:, 0], x_sim[:, 1], "k--", label="model", **plot_kws)
axs[1].legend()
axs[1].set(xlabel="$x_1$", ylabel="$x_2$")
fig.show()
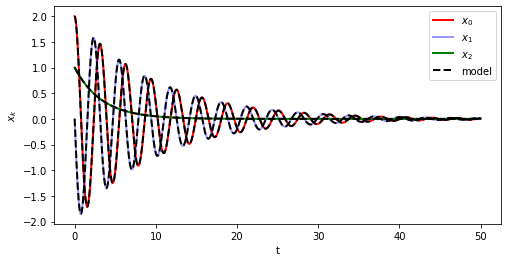
Linear 3D ODE
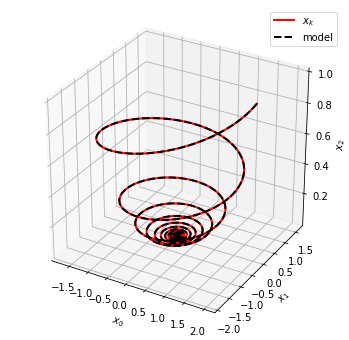
Our final example of this section shows the application of SINDy to identify of a linear system in three dimensions. The governing equations are given by the following system.
[8]:
# Generate training data
dt = .01
t_train = np.arange(0, 50, dt)
t_train_span = (t_train[0], t_train[-1])
x0_train = [2, 0, 1]
x_train = solve_ivp(linear_3D, t_train_span,
x0_train, t_eval=t_train, **integrator_keywords).y.T
[9]:
# Fit the model
poly_order = 5
threshold = 0.01
model = ps.SINDy(
optimizer=ps.STLSQ(threshold=threshold),
feature_library=ps.PolynomialLibrary(degree=poly_order)
)
model.fit(x_train, t=dt)
model.print()
(x0)' = -0.100 x0 + 2.000 x1
(x1)' = -2.000 x0 + -0.100 x1
(x2)' = -0.300 x2
[10]:
# Simulate and plot the results
x_sim = model.simulate(x0_train, t_train)
plot_kws = dict(linewidth=2)
fig = plt.figure(figsize=(8, 4))
plt.plot(t_train, x_train[:, 0], "r", label="$x_0$", **plot_kws)
plt.plot(t_train, x_train[:, 1], "b", label="$x_1$", alpha=0.4, **plot_kws)
plt.plot(t_train, x_train[:, 2], "g", label="$x_2$", **plot_kws)
plt.plot(t_train, x_sim[:, 0], "k--", label="model", **plot_kws)
plt.plot(t_train, x_sim[:, 1], "k--", **plot_kws)
plt.plot(t_train, x_sim[:, 2], "k--", **plot_kws)
plt.legend()
plt.xlabel("t")
plt.ylabel("$x_k$")
fig.show()
fig = plt.figure(figsize=(6, 6))
ax = fig.add_subplot(111, projection="3d")
ax.plot(x_train[:, 0], x_train[:, 1], x_train[:, 2], "r", label="$x_k$", **plot_kws)
ax.plot(x_sim[:, 0], x_sim[:, 1], x_sim[:, 2], "k--", label="model", **plot_kws)
ax.set(xlabel="$x_0$", ylabel="$x_1$", zlabel="$x_2$")
ax.legend()
fig.show()
Lorenz system (nonlinear ODE)
The Lorenz system serves as an example of a nonlinear ODE whose solutions exhibit chaotic dynamics evolving on a strange attractor. The Lorenz system is given by
with \(\sigma=10\), \(\rho=28\), and \(\beta=\tfrac{8}{3}\) for this example. We generate our training data starting from the initial condition \((-8, 8, 27)\). Note that for this example we also collect measurements of derivatives of state variables, \((\dot x, \dot y, \dot z)\).
[11]:
# Generate training data
dt = 0.001
t_train = np.arange(0, 100, dt)
t_train_span = (t_train[0], t_train[-1])
x0_train = [-8, 8, 27]
x_train = solve_ivp(lorenz, t_train_span,
x0_train, t_eval=t_train, **integrator_keywords).y.T
x_dot_train_measured = np.array(
[lorenz(0, x_train[i]) for i in range(t_train.size)]
)
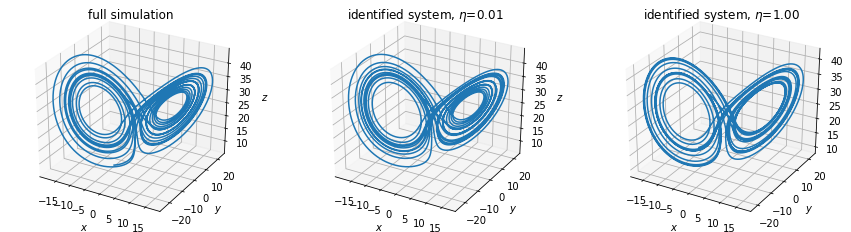
Measure states \(x\) and derivatives \(\dot{x}\)
In this example, both the states \(x\) and derivatives \(\dot{x}\) of the Lorenz system are measures, and increasing levels of noise (\(\eta\)) are added to the derivatives.
[12]:
# Fit the models and simulate
poly_order = 5
threshold = 0.05
noise_levels = [1e-4, 1e-3, 1e-2, 1e-1, 1.0]
models = []
t_sim = np.arange(0, 20, dt)
x_sim = []
for eps in noise_levels:
model = ps.SINDy(
optimizer=ps.STLSQ(threshold=threshold),
feature_library=ps.PolynomialLibrary(degree=poly_order),
)
model.fit(
x_train,
t=dt,
x_dot=x_dot_train_measured
+ np.random.normal(scale=eps, size=x_train.shape),
quiet=True,
)
models.append(model)
x_sim.append(model.simulate(x_train[0], t_sim))
[13]:
# Plot results
fig = plt.figure(figsize=(15, 4))
ax = fig.add_subplot(131, projection="3d")
ax.plot(
x_train[: t_sim.size, 0],
x_train[: t_sim.size, 1],
x_train[: t_sim.size, 2],
)
plt.title("full simulation")
ax.set(xlabel="$x$", ylabel="$y$", zlabel="$z$")
model_idx = 2
ax = fig.add_subplot(132, projection="3d")
ax.plot(x_sim[model_idx][:, 0], x_sim[model_idx][:, 1], x_sim[model_idx][:, 2])
plt.title(f"identified system, $\eta$={noise_levels[model_idx]:.2f}")
ax.set(xlabel="$x$", ylabel="$y$", zlabel="$z$")
model_idx = 4
ax = fig.add_subplot(133, projection="3d")
ax.plot(x_sim[model_idx][:, 0], x_sim[model_idx][:, 1], x_sim[model_idx][:, 2])
plt.title(f"identified system, $\eta$={noise_levels[model_idx]:.2f}")
ax.set(xlabel="$x$", ylabel="$y$", zlabel="$z$")
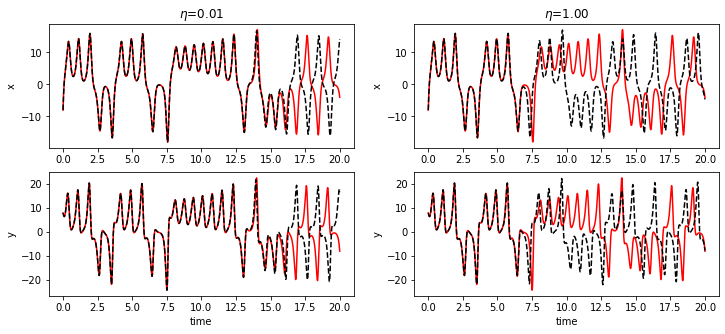
fig = plt.figure(figsize=(12, 5))
model_idx = 2
ax = fig.add_subplot(221)
ax.plot(t_sim, x_train[: t_sim.size, 0], "r")
ax.plot(t_sim, x_sim[model_idx][:, 0], "k--")
plt.title(f"$\eta$={noise_levels[model_idx]:.2f}")
plt.ylabel("x")
ax = fig.add_subplot(223)
ax.plot(t_sim, x_train[: t_sim.size, 1], "r")
ax.plot(t_sim, x_sim[model_idx][:, 1], "k--")
plt.xlabel("time")
plt.ylabel("y")
model_idx = 4
ax = fig.add_subplot(222)
ax.plot(t_sim, x_train[: t_sim.size, 0], "r")
ax.plot(t_sim, x_sim[model_idx][:, 0], "k--")
plt.title(f"$\eta$={noise_levels[model_idx]:.2f}")
plt.ylabel("x")
ax = fig.add_subplot(224)
ax.plot(t_sim, x_train[: t_sim.size, 1], "r")
ax.plot(t_sim, x_sim[model_idx][:, 1], "k--")
plt.xlabel("time")
plt.ylabel("y")
fig.show()
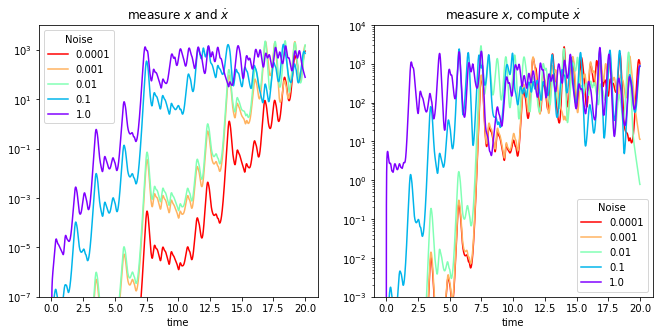
Measure only the states \(x\), compute the derivatives
In this example, only the states \(x\) are measured and noise at different levels is added to the states. Derivatives are computed from the noisy state measurements using a centered difference scheme.
[14]:
# Fit the models and simulate
noise_levels = [1e-4, 1e-3, 1e-2, 1e-1, 1.0]
models_noD = []
t_sim = np.arange(0, 20, dt)
x_sim_noD = []
for eps in noise_levels:
model = ps.SINDy(
optimizer=ps.STLSQ(threshold=threshold),
feature_library=ps.PolynomialLibrary(degree=poly_order),
)
model.fit(x_train + np.random.normal(scale=eps, size=x_train.shape),
t=dt, quiet=True)
models_noD.append(model)
x_sim_noD.append(model.simulate(x_train[0], t_sim))
Compare the errors in each case
Here we plot the error as a function of time for varying levels of noise.
[15]:
colors = rainbow(np.linspace(1, 0, len(models)))
fig, axs = plt.subplots(1, 2, figsize=(11, 5))
for i, x in enumerate(x_sim):
axs[0].semilogy(
t_sim,
np.sum((x - x_train[: t_sim.size]) ** 2, axis=1),
color=colors[i],
label=noise_levels[i],
)
axs[0].set(xlabel="time", title="measure $x$ and $\dot{x}$")
axs[0].legend(title="Noise")
axs[0].set_ylim(1e-7, 1e4)
for i, x in enumerate(x_sim_noD):
axs[1].semilogy(
t_sim,
np.sum((x - x_train[: t_sim.size]) ** 2, axis=1),
color=colors[i],
label=noise_levels[i],
)
axs[1].set(xlabel="time", title="measure $x$, compute $\dot{x}$")
axs[1].legend(title="Noise")
axs[1].set_ylim(1e-3, 1e4)
fig.show()
Fluid wake behind a cylinder (nonlinear PDE)
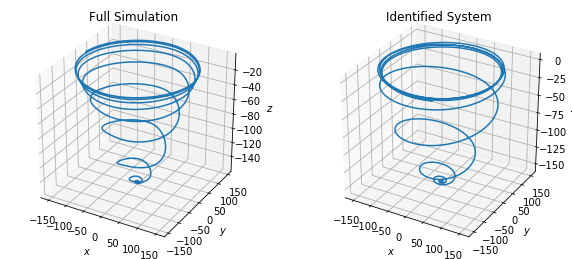
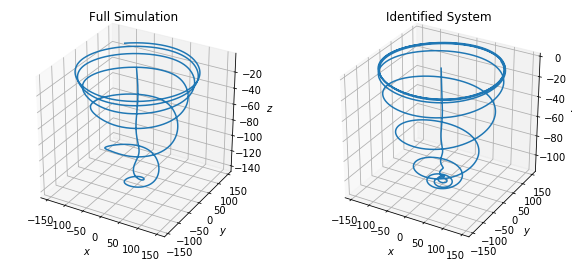
This example demonstrates the application of SINDy to a high-dimensional nonlinear partial differential equation. The two-dimensional Navier-Stokes equations are simulated to generate state measurements for fluid flow past a cylinder at Reynolds number 100. The proper orthogonal decomposition (POD) is applied to the high-dimensional state measurements (with dimensionality determined by the number of grid points in the simulation) to get a low-dimensional representation of the dynamics. SINDy is then applied to the dynamics in the first three POD modes.
[16]:
# Load training data
dt = 0.02
r = 2
n = r + 1
data_run1 = loadmat("data/PODcoefficients.mat")
x_run1 = np.concatenate(
(data_run1["alpha"][:5000, :r], data_run1["alphaS"][:5000, 0:1]), axis=1
)
t_run1 = np.arange(0, dt * x_run1.shape[0], dt)
data_run2 = loadmat("data/PODcoefficients_run1.mat")
x_run2 = np.concatenate(
(data_run2["alpha"][:3000, :r], data_run2["alphaS"][:3000, 0:1]), axis=1
)
t_run2 = np.arange(0, dt * x_run2.shape[0], dt)
x_train = [x_run1, x_run2]
t_train = [t_run1, t_run2]
[17]:
# Fit the model
optimizer = ps.STLSQ(threshold=1e-4)
library = ps.PolynomialLibrary(degree=5)
model = ps.SINDy(
optimizer=optimizer,
feature_library=library,
feature_names=["x", "y", "z"]
)
model.fit(x_train, t_train, multiple_trajectories=True, quiet=True)
model.print()
(x)' = -0.133 1 + -0.009 x + -1.023 y + -0.001 z + -0.002 y z
(y)' = -0.057 1 + 1.035 x + 0.005 y + 0.002 x z + -0.002 y z
(z)' = -20.653 1 + -0.294 z + 0.001 x^2 + 0.001 y^2 + -0.001 z^2
[18]:
# Simulate the model
x_simulate_run1 = model.simulate(x_run1[0], np.arange(0, 100, 0.02))
x_simulate_run2 = model.simulate(x_run2[0], np.arange(0, 95, 0.02))
[19]:
# Plot results
fig = plt.figure(figsize=(10, 4.5))
ax = fig.add_subplot(121, projection="3d")
ax.plot(x_run1[:, 0], x_run1[:, 1], x_run1[:, 2])
ax.set(xlabel="$x$", ylabel="$y$", zlabel="$z$")
plt.title("Full Simulation")
ax = fig.add_subplot(122, projection="3d")
ax.plot(x_simulate_run1[:, 0], x_simulate_run1[:, 1], x_simulate_run1[:, 2])
ax.set(xlabel="$x$", ylabel="$y$", zlabel="$z$")
plt.title("Identified System")
fig = plt.figure(figsize=(10, 4.5))
ax = fig.add_subplot(121, projection="3d")
ax.plot(x_run2[:, 0], x_run2[:, 1], x_run2[:, 2])
ax.set(xlabel="$x$", ylabel="$y$", zlabel="$z$")
plt.title("Full Simulation")
ax = fig.add_subplot(122, projection="3d")
ax.plot(x_simulate_run2[:, 0], x_simulate_run2[:, 1], x_simulate_run2[:, 2])
ax.set(xlabel="$x$", ylabel="$y$", zlabel="$z$")
plt.title("Identified System")
fig.show()
Bifurcations and normal forms
The examples in this section demonstate the ability of SINDy to incorporate parameterized dynamical systems (e.g. normal forms associated with a bifurcation parameter). Note that the parameter, \(\mu\), in these examples is embedded in the dynamics as a variable
whose value can the be recovered with SINDy.
We demonstrate this procedure with two examples: the 1D logistic map and the 2D Hopf normal form.
Logistic map
This is a discrete time example that exhibits several bifurcations.
Discrete time systems require a slightly different treatment than the previous systems. We consider discrete systems of the following form
To apply SINDy to discrete-time problems, one forms the two data matrices \(X_1^{m-1}\) and \(X_2^m\), given by
The original sparse regression problem is then supplanted by
The dynamics of the logistic map are described by
where \(\mu\) is the bifurcation parameter and \(\eta_k\sim N(0, 10^{-3})\) is a (normally distributed) stochastic forcing parameter.
We collect training data consisting of 1000 steps of the logistic map with 10 different values of \(\mu\); \(\mu\in\{2.5, 2.75, 3, 3.25, 3.5, 3.75, 3.8, 3.85, 3.9, 3.95\}\).
[20]:
# Generate training data
N = 1000
mus = [2.5, 2.75, 3, 3.25, 3.5, 3.75, 3.8, 3.85, 3.9, 3.95]
eps = 0.025
x = [np.zeros((N, 2)) for i in range(len(mus))]
for i, mu in enumerate(mus):
x[i][0] = [0.5, mu]
for k in range(1, N):
x[i][k, 0] = np.maximum(
np.minimum(
mu * x[i][k - 1, 0] * (1 - x[i][k - 1, 0])
+ eps * np.random.randn(),
1.0,
),
0.0,
)
x[i][k, 1] = mu
x_train = x
Fitting a SINDy model (with discrete_time=True), we find that the underlying dynamics are accurately recovered. Note that we do not attempt to capture the stochastic forcing, merely the denoised model.
[21]:
# Fit the model
optimizer = ps.STLSQ(threshold=0.1)
library = ps.PolynomialLibrary(degree=5)
model = ps.SINDy(
optimizer=optimizer,
feature_library=library,
discrete_time=True
)
model.fit(x_train, multiple_trajectories=True)
model.print()
(x0)[k+1] = 1.000 x0[k] x1[k] + -1.000 x0[k]^2 x1[k]
(x1)[k+1] = 1.000 x1[k]
We test the performance of the learned model by applying it to generate predictions for multiple values of \(1\leq\mu\leq4\).
[22]:
# Generate test data (with stochastic forcing)
mus = np.arange(1, 4, 0.01)
x_test = np.zeros((mus.size * N, 2))
idx = 0
for mu in mus:
xold = 0.5
for i in range(N):
xnew = np.maximum(
np.minimum(
mu * xold - mu * xold ** 2 + eps * np.random.randn(), 1.0
),
0.0,
)
xold = xnew
xss = xnew
for i in range(N):
xnew = np.maximum(
np.minimum(
mu * xold - mu * xold ** 2 + eps * np.random.randn(), 1.0
),
0.0,
)
xold = xnew
x_test[idx, 0] = xnew
x_test[idx, 1] = mu
idx += 1
if np.abs(xnew - xss) < 0.001:
break
x_test = x_test[:idx]
[23]:
# Simulate on test data
x_sim = np.zeros((mus.size * N, 2))
idx = 0
for mu in mus:
xss = model.simulate([0.5, mu], N)[-1]
stop_condition = lambda x: np.abs(x[0] - xss[0]) < 0.001
x = model.simulate(xss, N, stop_condition=stop_condition)
idx_new = idx + x.shape[0]
x_sim[idx:idx_new] = x
idx = idx_new
x_sim = x_sim[:idx]
[24]:
# Plot results
fig, axs = plt.subplots(2, 2, figsize=(12, 12), sharex=True)
axs[0, 0].plot(x_test[:, 0], x_test[:, 1], "k.", markersize=1)
axs[0, 0].set(
title="Stochastic system",
ylabel="$\mu$",
ylim=[4, 1]
)
axs[1, 0].plot(x_test[:, 0], x_test[:, 1], "k.", markersize=1)
axs[1, 0].set(ylabel="$\mu$", ylim=[4, 3.45])
axs[0, 1].plot(x_sim[:, 0], x_sim[:, 1], "k.", markersize=1)
axs[0, 1].set(
title="Sparse identified system",
ylabel="$\mu$",
ylim=[4, 1]
)
axs[1, 1].plot(x_sim[:, 0], x_sim[:, 1], "k.", markersize=1)
axs[1, 1].set(ylabel="$\mu$", ylim=[4, 3.45])
fig.show()
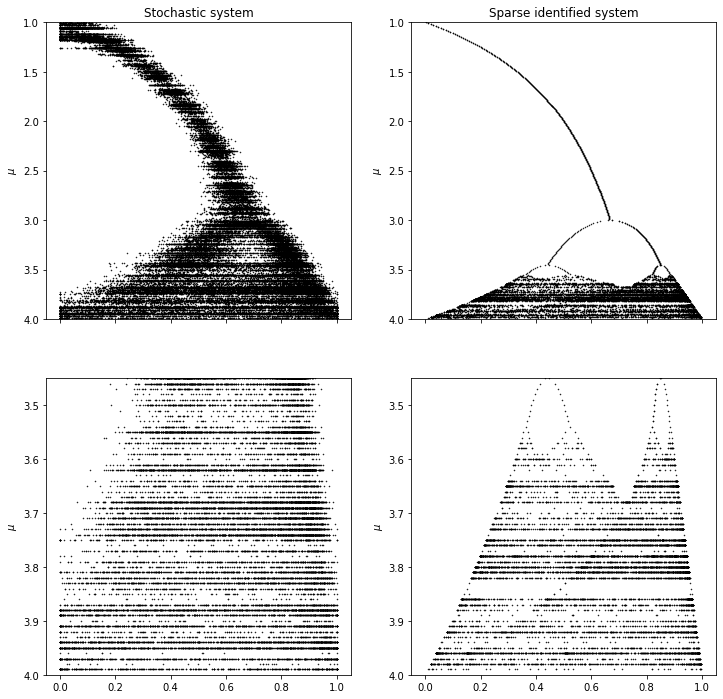
Notice that, despite the large amount of noise present in the stochastically forced system from which measurements are taken, SINDy is able to closely approximate the (denoised) underlying model. This is due, at least in part, to the fact that no derivatives need to be computed.
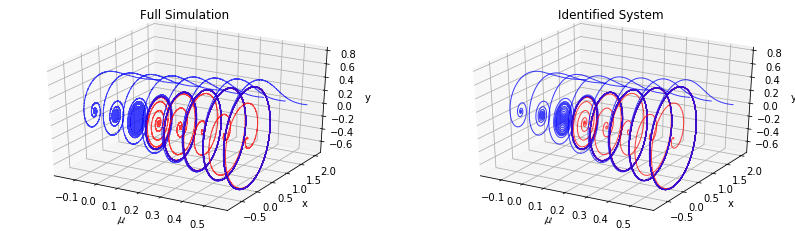
Hopf normal form
This example shows the identification of the Hopf normal form, which is a parameterized normal form in continuous time.
We collect noisy data from the Hopf system
with different values of the bifurcation parameter \(\mu\) (fixing \(\omega=A=1\)).
As in the previous example \(\mu\) is incorporated into the model discovery process by introducing a third equation
If \(\mu<0\) then a (stable) fixed point occurs at \((x,y)=(0,0)\) and if \(\mu>0\) then a (stable) limit cycle occurs on the circle \(x^2+y^2 = \mu\) instead. We test SINDy using two negative values and six positive values of \(\mu\).
[25]:
# Generate training data
omega = 1
A = 1
dt = 0.0025
t_train = np.arange(0, 75, dt)
t_train_span = (t_train[0], t_train[-1])
mu_stable = np.array([-0.15, -0.05])
mu_unstable = np.array([0.05, 0.15, 0.25, 0.35, 0.45, 0.55])
n_ics = mu_stable.size + 2 * mu_unstable.size
x_train = [np.zeros((t_train.size, 3)) for i in range(n_ics)]
eps = 0.001
ic_idx = 0
for mu in mu_stable:
x0_train = [2, 0]
x = solve_ivp(lambda t, x: hopf(t, x, mu, omega, A), t_train_span,
x0_train, t_eval=t_train, **integrator_keywords).y.T
x_train[ic_idx][:, 0:2] = x + eps * np.random.normal(size=x.shape)
x_train[ic_idx][:, 2] = mu
ic_idx += 1
for mu in mu_unstable:
x0_train = [0.01, 0]
x = solve_ivp(lambda t, x: hopf(t, x, mu, omega, A), t_train_span,
x0_train, t_eval=t_train, **integrator_keywords).y.T
x_train[ic_idx][:, 0:2] = x + eps * np.random.normal(size=x.shape)
x_train[ic_idx][:, 2] = mu
ic_idx += 1
x0_train = [2, 0]
x = solve_ivp(lambda t, x: hopf(t, x, mu, omega, A), t_train_span,
x0_train, t_eval=t_train, **integrator_keywords).y.T
x_train[ic_idx][:, 0:2] = x + eps * np.random.normal(size=x.shape)
x_train[ic_idx][:, 2] = mu
ic_idx += 1
[26]:
# Fit the model
optimizer = ps.STLSQ(threshold=0.85)
library = ps.PolynomialLibrary(degree=5)
model = ps.SINDy(optimizer=optimizer, feature_library=library)
model.fit(x_train, t=dt, multiple_trajectories=True, quiet=True)
model.print()
(x0)' = -1.000 x1 + 1.001 x0 x2 + -1.002 x0^3 + -1.001 x0 x1^2
(x1)' = 1.000 x0 + 1.000 x1 x2 + -1.000 x0^2 x1 + -1.000 x1^3
(x2)' = 0.000
[27]:
# Simulate the model
x_sim = [np.zeros((t_train.size, 3)) for i in range(n_ics)]
ic_idx = 0
for mu in mu_stable:
x0_train = np.array([2, 0, mu])
x_sim[ic_idx] = model.simulate(x0_train, t_train)
ic_idx += 1
for mu in mu_unstable:
x0_train = np.array([0.01, 0, mu])
x_sim[ic_idx] = model.simulate(x0_train, t_train)
ic_idx += 1
x0_train = np.array([2, 0, mu])
x_sim[ic_idx] = model.simulate(x0_train, t_train)
ic_idx += 1
Blue trajectories show the evolution of initial conditions starting outside the limit cycle for \(\mu>0\) or away from the fixed point for \(\mu<0\). Red ones correspond to initial conditions inside the limit cycle.
[28]:
# Plot results
fig = plt.figure(figsize=(14, 4))
plot_kws=dict(alpha=0.75, linewidth=1)
ax = fig.add_subplot(121, projection="3d")
for i in range(n_ics):
if i > 2 and i % 2 == 0:
ax.plot(
x_train[i][:, 2], x_train[i][:, 0], x_train[i][:, 1], "r", **plot_kws)
else:
ax.plot(x_train[i][:, 2], x_train[i][:, 0], x_train[i][:, 1], "b", **plot_kws)
ax.set(title="Full Simulation", xlabel="$\mu$", ylabel="x", zlabel="y")
ax = fig.add_subplot(122, projection="3d")
for i in range(n_ics):
if i > 2 and i % 2 == 0:
ax.plot(x_sim[i][:, 2], x_sim[i][:, 0], x_sim[i][:, 1], "r", **plot_kws)
else:
ax.plot(x_sim[i][:, 2], x_sim[i][:, 0], x_sim[i][:, 1], "b", **plot_kws)
ax.set(title="Identified System", xlabel="$\mu$", ylabel="x", zlabel="y")
fig.show()